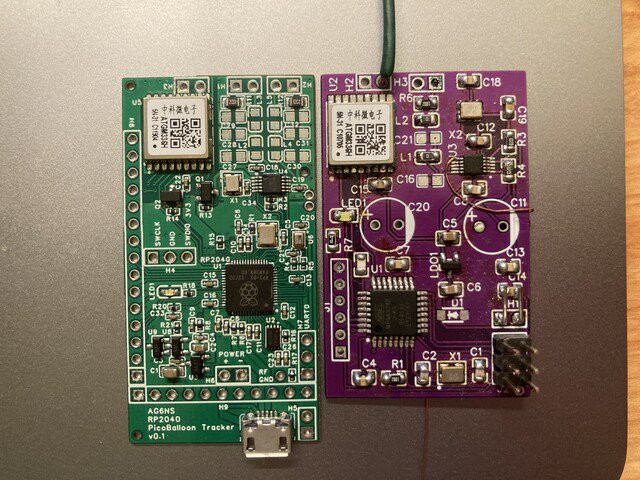
All of our recent flights have been testing new hardware and software. Kazu designed a new tracker based on the Raspberry Pi Pico board and the GPS/transmitter used on our ATMega328 based tracker. Tracker details. Work is underway to add new features but will take time. It will eventually be released as FOSS HW/SW.
The RP2040 is a dual ARM Cortex-M0+ running at 133MHz but can slow down to save power. The two cores are partitioned so one core is devoted to operating the tracker while the other is free for other purposes, like student experiments.
A special buoy mode has been developed to send more precise position location.
